slalom::Shape スラロームの形状を表す構造体 [詳解]
#include <slalom.h>
ctrl::slalom::Shape 連携図
公開メンバ関数 | |
| Shape (const Pose &total, const float y_curve_end, const float x_adv=0, const float dddth_max=dddth_max_default, const float ddth_max=ddth_max_default, const float dth_max=dth_max_default) | |
| 拘束条件からスラローム形状を生成するコンストラクタ [詳解] | |
| Shape (const Pose &total, const Pose &curve, float straight_prev, const float straight_post, const float v_ref, const float dddth_max, const float ddth_max, const float dth_max) | |
| 生成済みスラローム形状を単に代入するコンストラクタ [詳解] | |
静的公開メンバ関数 | |
| static void | integrate (const AccelDesigner &ad, State &s, const float v, const float t, const float Ts, const float k_slip=0) |
| 軌道の積分を行う関数。ルンゲクッタ法を使用して数値積分を行う。 [詳解] | |
公開変数類 | |
| Pose | total |
| 前後の直線を含めた移動位置姿勢 [詳解] | |
| Pose | curve |
| カーブ部分の移動位置姿勢 [詳解] | |
| float | straight_prev |
| カーブ前の直線の距離 [m] [詳解] | |
| float | straight_post |
| カーブ後の直線の距離 [m] [詳解] | |
| float | v_ref |
| カーブ部分の基準速度 [m/s] [詳解] | |
| float | dddth_max |
| 最大角躍度の大きさ [rad/s/s/s] [詳解] | |
| float | ddth_max |
| 最大角加速度の大きさ [rad/s/s] [詳解] | |
| float | dth_max |
| 最大角速度の大きさ [rad/s] [詳解] | |
フレンド | |
| std::ostream & | operator<< (std::ostream &os, const Shape &obj) |
| 情報の表示 [詳解] | |
詳解
slalom::Shape スラロームの形状を表す構造体
メンバー変数は互いに依存して決定されているので、 個別に数値を変更することは許されない。 スラローム軌道を得るには slalom::Trajectory を用いる。
構築子と解体子
◆ Shape() [1/2]
|
inline |
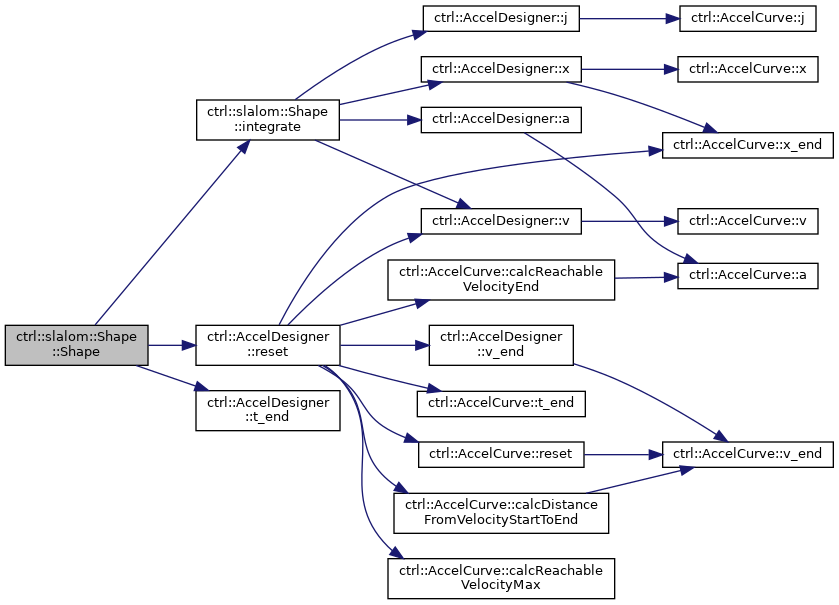
拘束条件からスラローム形状を生成するコンストラクタ
- 引数
-
[in] total 前後の直線を含めた移動位置姿勢 [m, m, rad] [in] y_curve_end y軸方向(進行方向に垂直な方向)の移動距離 [m]。 カーブの大きさを決めるもので、形状の設計パラメータとなる [in] x_adv x軸方向(進行方向)の前後の直線の長さ [m]。 180度ターンの場合のみで使用。 [in] dddth_max 最大角躍度の大きさ [rad/s/s/s] [in] ddth_max 最大角加速度の大きさ [rad/s/s] [in] dth_max 最大角速度の大きさ [rad/s]
static void integrate(const AccelDesigner &ad, State &s, const float v, const float t, const float Ts, const float k_slip=0)
軌道の積分を行う関数。ルンゲクッタ法を使用して数値積分を行う。
Definition: slalom.h:144
呼び出し関係図:
◆ Shape() [2/2]
|
inline |
生成済みスラローム形状を単に代入するコンストラクタ
- 引数
-
[in] total 前後の直線を含めた移動位置姿勢 [m, m, rad] [in] curve 曲線部分の変位 [m, m, rad] [in] straight_prev 曲線前の直線の長さ [m] [in] straight_post 曲線後の直線の長さ [m] [in] v_ref 基準並進速度 [m/s] [in] dddth_max 最大角躍度の大きさ [rad/s/s/s] [in] ddth_max 最大角加速度の大きさ [rad/s/s] [in] dth_max 最大角速度の大きさ [rad/s]
関数詳解
◆ integrate()
|
inlinestatic |
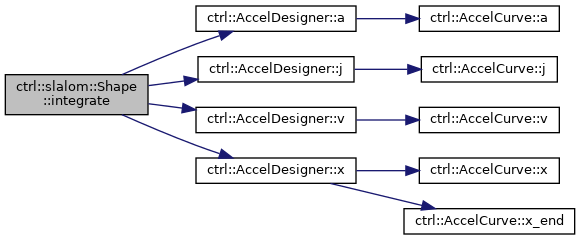
軌道の積分を行う関数。ルンゲクッタ法を使用して数値積分を行う。
- 引数
-
[in] ad 角速度分布 [in,out] s 状態変数 [in] v 並進速度 [m/s] [in] t 時刻 [s] [in] Ts 積分時間 [s] [in] k_slip スリップ角定数
呼び出し関係図:
フレンドと関連関数の詳解
◆ operator<<
|
friend |
情報の表示
メンバ詳解
◆ curve
| Pose ctrl::slalom::Shape::curve |
カーブ部分の移動位置姿勢
◆ dddth_max
| float ctrl::slalom::Shape::dddth_max |
最大角躍度の大きさ [rad/s/s/s]
◆ ddth_max
| float ctrl::slalom::Shape::ddth_max |
最大角加速度の大きさ [rad/s/s]
◆ dth_max
| float ctrl::slalom::Shape::dth_max |
最大角速度の大きさ [rad/s]
◆ straight_post
| float ctrl::slalom::Shape::straight_post |
カーブ後の直線の距離 [m]
◆ straight_prev
| float ctrl::slalom::Shape::straight_prev |
カーブ前の直線の距離 [m]
◆ total
| Pose ctrl::slalom::Shape::total |
前後の直線を含めた移動位置姿勢
◆ v_ref
| float ctrl::slalom::Shape::v_ref |
カーブ部分の基準速度 [m/s]
この構造体詳解は次のファイルから抽出されました:
- ctrl/slalom/slalom.h