slalom::Trajectory スラローム軌道を生成するクラス [詳解]
#include <trajectory.h>
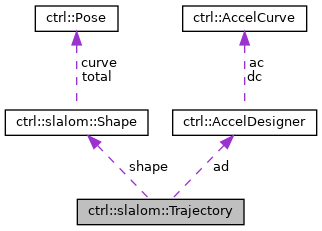
ctrl::slalom::Trajectory 連携図
公開メンバ関数 | |
| Trajectory (const Shape &shape, const bool mirror_x=false) | |
| コンストラクタ [詳解] | |
| void | reset (const float velocity, const float th_start=0, const float t_start=0) |
| 並進速度を設定して軌道を初期化する関数 [詳解] | |
| void | update (State &state, const float t, const float Ts, const float k_slip=0) const |
| 軌道の更新 [詳解] | |
| float | getVelocity () const |
| 並進速度を取得 [詳解] | |
| float | getTimeCurve () const |
| ターンの合計時間を取得 [詳解] | |
| const Shape & | getShape () const |
| スラローム形状を取得 [詳解] | |
| const AccelDesigner & | getAccelDesigner () const |
| 角速度設計器を取得 [詳解] | |
限定公開変数類 | |
| Shape | shape |
| スラロームの形状 [詳解] | |
| AccelDesigner | ad |
| 角速度用の曲線加速生成器 [詳解] | |
| float | velocity |
| 並進速度 [詳解] | |
詳解
slalom::Trajectory スラローム軌道を生成するクラス
スラローム形状 Shape と並進速度をもとに、各時刻における位置や速度を提供する。
構築子と解体子
◆ Trajectory()
|
inline |
コンストラクタ
- 引数
-
[in] shape スラローム形状 [in] mirror_x スラローム形状を$x$軸反転(進行方向に対して左右反転)する
呼び出し関係図:

関数詳解
◆ getAccelDesigner()
|
inline |
角速度設計器を取得
◆ getShape()
◆ getTimeCurve()
|
inline |
ターンの合計時間を取得
呼び出し関係図:

◆ getVelocity()
|
inline |
並進速度を取得
◆ reset()
|
inline |
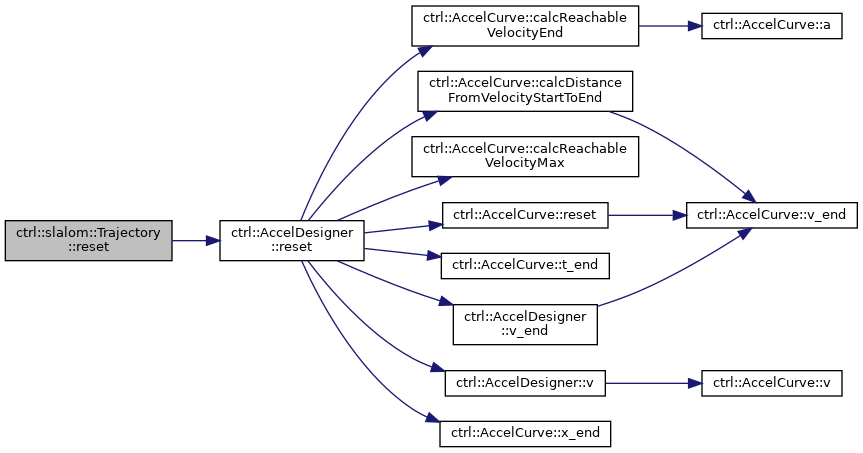
並進速度を設定して軌道を初期化する関数
- 引数
-
velocity 並進速度 [m/s] th_start 初期姿勢 [rad] (オプション) t_start 初期時刻 [s] (オプション)
void reset(const float j_max, const float a_max, const float v_max, const float v_start, const float v_target, const float dist, const float x_start=0, const float t_start=0)
引数の拘束条件から曲線を生成する関数
Definition: accel_designer.h:70
呼び出し関係図:
◆ update()
|
inline |
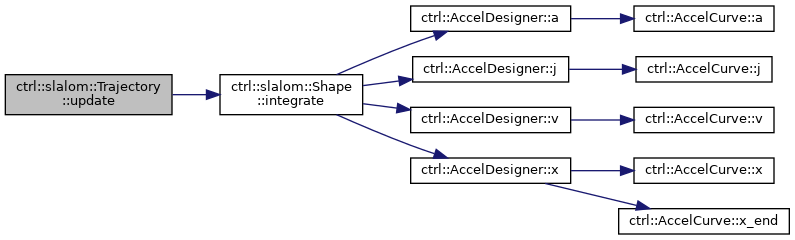
軌道の更新
- 引数
-
[in,out] state 次の時刻に更新する現在状態 [in] t 現在時刻 [s] [in] Ts 積分時間 [s] [in] k_slip スリップ角の比例定数
static void integrate(const AccelDesigner &ad, State &s, const float v, const float t, const float Ts, const float k_slip=0)
軌道の積分を行う関数。ルンゲクッタ法を使用して数値積分を行う。
Definition: slalom.h:144
呼び出し関係図:
メンバ詳解
◆ ad
|
protected |
角速度用の曲線加速生成器
◆ shape
|
protected |
スラロームの形状
◆ velocity
|
protected |
並進速度
このクラス詳解は次のファイルから抽出されました:
- ctrl/slalom/trajectory.h