拘束条件を満たす曲線加減速の軌道を生成するクラス [詳解]
#include <accel_designer.h>
ctrl::AccelDesigner の継承関係図
ctrl::AccelDesigner 連携図
公開メンバ関数 | |
| AccelDesigner (const float j_max, const float a_max, const float v_max, const float v_start, const float v_target, const float dist, const float x_start=0, const float t_start=0) | |
| 初期化付きコンストラクタ [詳解] | |
| AccelDesigner () | |
| とりあえずインスタンス化を行う空のコンストラクタ [詳解] | |
| void | reset (const float j_max, const float a_max, const float v_max, const float v_start, const float v_target, const float dist, const float x_start=0, const float t_start=0) |
| 引数の拘束条件から曲線を生成する関数 [詳解] | |
| float | j (const float t) const |
| 任意の時刻 t [s] における躍度 j [m/s/s/s] を返す関数 [詳解] | |
| float | a (const float t) const |
| 任意の時刻 t [s] における加速度 a [m/s/s] を返す関数 [詳解] | |
| float | v (const float t) const |
| 任意の時刻 t [s] における速度 v [m/s] を返す関数 [詳解] | |
| float | x (const float t) const |
| 任意の時刻 t [s] における位置 x [m] を返す関数 [詳解] | |
| float | t_end () const |
| 終点時刻 [s] [詳解] | |
| float | v_end () const |
| 終点速度 [m/s] [詳解] | |
| float | x_end () const |
| 終点位置 [m] [詳解] | |
| float | t_0 () const |
| 曲線加速の開始時刻 [s] [詳解] | |
| float | t_1 () const |
| 最高速度に達する時刻 [s] [詳解] | |
| float | t_2 () const |
| 曲線減速の開始時刻 [s] [詳解] | |
| float | t_3 () const |
| 曲線減速の終了時刻 [s] [詳解] | |
| const std::array< float, 8 > | getTimeStamps () const |
| 曲線加速の境界のタイムスタンプを取得 [詳解] | |
| void | printCsv (const float t_interval=1e-3f) const |
| stdout に軌道のcsvを出力する関数。 [詳解] | |
| void | printCsv (std::ostream &os, const float t_interval=1e-3f) const |
| std::ostream に軌道のcsvを出力する関数。 [詳解] | |
限定公開変数類 | |
| float | t0 |
| float | t1 |
| float | t2 |
| float | t3 |
| 境界点の時刻 [s] [詳解] | |
| float | x0 |
| float | x3 |
| 境界点の位置 [m] [詳解] | |
| AccelCurve | ac |
| 曲線加速用オブジェクト [詳解] | |
| AccelCurve | dc |
| 曲線減速用オブジェクト [詳解] | |
フレンド | |
| std::ostream & | operator<< (std::ostream &os, const AccelDesigner &obj) |
| 情報の表示 [詳解] | |
詳解
拘束条件を満たす曲線加減速の軌道を生成するクラス
- 目標速度や移動距離などの拘束条件を満たす曲線加速軌道を生成する
- 任意の時刻 $t$ における躍度 $j(t)$、加速度 $a(t)$、速度 $v(t)$、位置 $x(t)$ を返す連続な関数を提供する
- 最大加速度 $a_{\max}$ と始点速度 $v_s$ など拘束次第では目標速度 $v_t$ に達することができない場合があるので注意する
構築子と解体子
◆ AccelDesigner() [1/2]
|
inline |
初期化付きコンストラクタ
- 引数
-
[in] j_max 最大躍度の大きさ [m/s/s/s]、正であること [in] a_max 最大加速度の大きさ [m/s/s], 正であること [in] v_max 最大速度の大きさ [m/s]、正であること [in] v_start 始点速度 [m/s] [in] v_target 目標速度 [m/s] [in] dist 移動距離 [m] [in] x_start 始点位置 [m] (オプション) [in] t_start 始点時刻 [s] (オプション)
void reset(const float j_max, const float a_max, const float v_max, const float v_start, const float v_target, const float dist, const float x_start=0, const float t_start=0)
引数の拘束条件から曲線を生成する関数
Definition: accel_designer.h:70
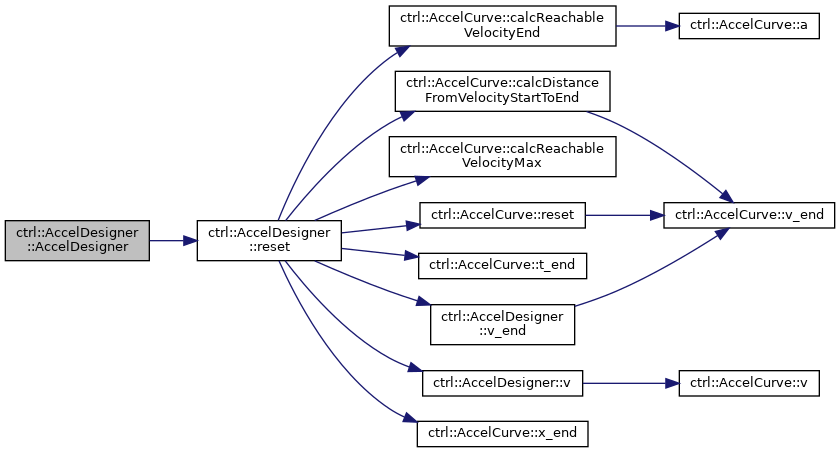
呼び出し関係図:
◆ AccelDesigner() [2/2]
|
inline |
関数詳解
◆ a()
|
inline |
任意の時刻 t [s] における加速度 a [m/s/s] を返す関数
- 引数
-
[in] 時刻 t [s]
- 戻り値
- 加速度 [m/s/s]
float a(const float t) const
任意の時刻 t [s] における加速度 a [m/s/s] を返す関数
Definition: accel_curve.h:149
呼び出し関係図:

◆ getTimeStamps()
|
inline |
曲線加速の境界のタイムスタンプを取得
呼び出し関係図:
◆ j()
|
inline |

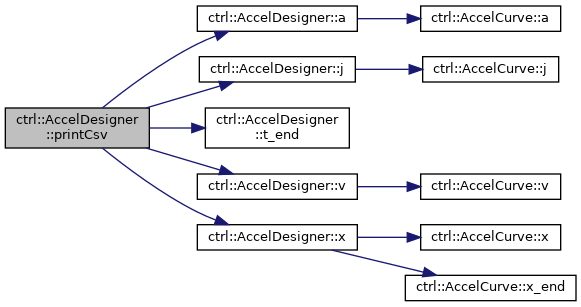
◆ printCsv() [1/2]
|
inline |
stdout に軌道のcsvを出力する関数。
void printCsv(const float t_interval=1e-3f) const
stdout に軌道のcsvを出力する関数。
Definition: accel_designer.h:252
◆ printCsv() [2/2]
|
inline |
std::ostream に軌道のcsvを出力する関数。
float j(const float t) const
任意の時刻 t [s] における躍度 j [m/s/s/s] を返す関数
Definition: accel_designer.h:167
float a(const float t) const
任意の時刻 t [s] における加速度 a [m/s/s] を返す関数
Definition: accel_designer.h:178
float x(const float t) const
任意の時刻 t [s] における位置 x [m] を返す関数
Definition: accel_designer.h:200
float v(const float t) const
任意の時刻 t [s] における速度 v [m/s] を返す関数
Definition: accel_designer.h:189
呼び出し関係図:
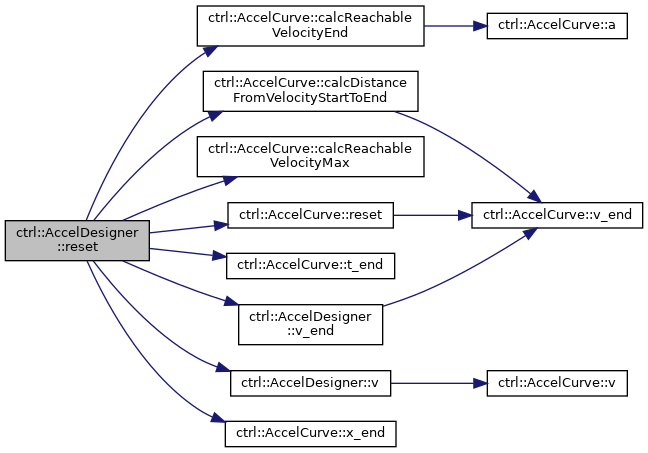
◆ reset()
|
inline |
引数の拘束条件から曲線を生成する関数
この関数によってもれなくすべての変数が初期化される。
- 引数
-
[in] j_max 最大躍度の大きさ [m/s/s/s]、正であること [in] a_max 最大加速度の大きさ [m/s/s], 正であること [in] v_max 最大速度の大きさ [m/s]、正であること [in] v_start 始点速度 [m/s] [in] v_target 目標速度 [m/s] [in] dist 移動距離 [m] [in] x_start 始点位置 [m] (オプション) [in] t_start 始点時刻 [s] (オプション)
static float calcReachableVelocityMax(const float j_max, const float a_max, const float vs, const float ve, const float d)
走行距離の拘束から達しうる最大速度を算出する関数
Definition: accel_curve.h:316
void reset(const float j_max, const float a_max, const float v_start, const float v_end)
引数の拘束条件から曲線を生成する関数
Definition: accel_curve.h:92
static float calcReachableVelocityEnd(const float j_max, const float a_max, const float vs, const float vt, const float d)
走行距離の拘束から達しうる終点速度を算出する関数
Definition: accel_curve.h:263
static float calcDistanceFromVelocityStartToEnd(const float j_max, const float a_max, const float v_start, const float v_end)
速度差の拘束から達しうる変位を算出する関数
Definition: accel_curve.h:345
呼び出し関係図:
◆ t_0()
|
inline |
曲線加速の開始時刻 [s]
◆ t_1()
|
inline |
最高速度に達する時刻 [s]
◆ t_2()
|
inline |
曲線減速の開始時刻 [s]
◆ t_3()
|
inline |
曲線減速の終了時刻 [s]
◆ t_end()
|
inline |
終点時刻 [s]
◆ v()
|
inline |

◆ v_end()
|
inline |
終点速度 [m/s]
呼び出し関係図:

◆ x()
|
inline |
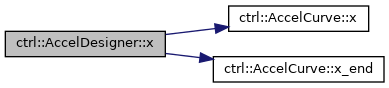
◆ x_end()
|
inline |
終点位置 [m]
フレンドと関連関数の詳解
◆ operator<<
|
friend |
情報の表示
メンバ詳解
◆ ac
|
protected |
曲線加速用オブジェクト
◆ dc
|
protected |
曲線減速用オブジェクト
◆ t0
|
protected |
◆ t1
|
protected |
◆ t2
|
protected |
◆ t3
|
protected |
境界点の時刻 [s]
◆ x0
|
protected |
◆ x3
|
protected |
境界点の位置 [m]
このクラス詳解は次のファイルから抽出されました:
- ctrl/accel_designer.h