迷路探索アルゴリズムの使用例 [詳解]
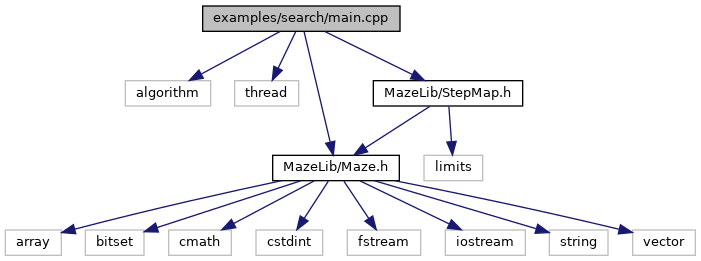
main.cpp の依存先関係図:
関数 | |
| void | MoveRobot (const Direction relativeDir) |
| ロボットを動かす模擬関数 [詳解] | |
| void | ShowAnimation (const StepMap &stepMap, const Maze &maze, const Position &pos, const Direction &dir, const std::string &msg) |
| アニメーション状に迷路を表示する関数 [詳解] | |
| int | SearchRun (Maze &maze, const Maze &mazeTarget) |
| 探索走行のアルゴリズム [詳解] | |
| int | ShortestRun (const Maze &maze) |
| 最短走行のアルゴリズム [詳解] | |
| int | main (void) |
| main 関数 [詳解] | |
詳解
迷路探索アルゴリズムの使用例
- 日付
- 2019-08-29
関数詳解
◆ main()
| int main | ( | void | ) |
main 関数
void print(std::ostream &os=std::cout, const int mazeSize=MAZE_SIZE) const
迷路の表示
Definition: Maze.cpp:261
bool parse(std::istream &is)
特定の迷路の文字列(*.maze ファイル)から壁をパースする
Definition: Maze.cpp:165
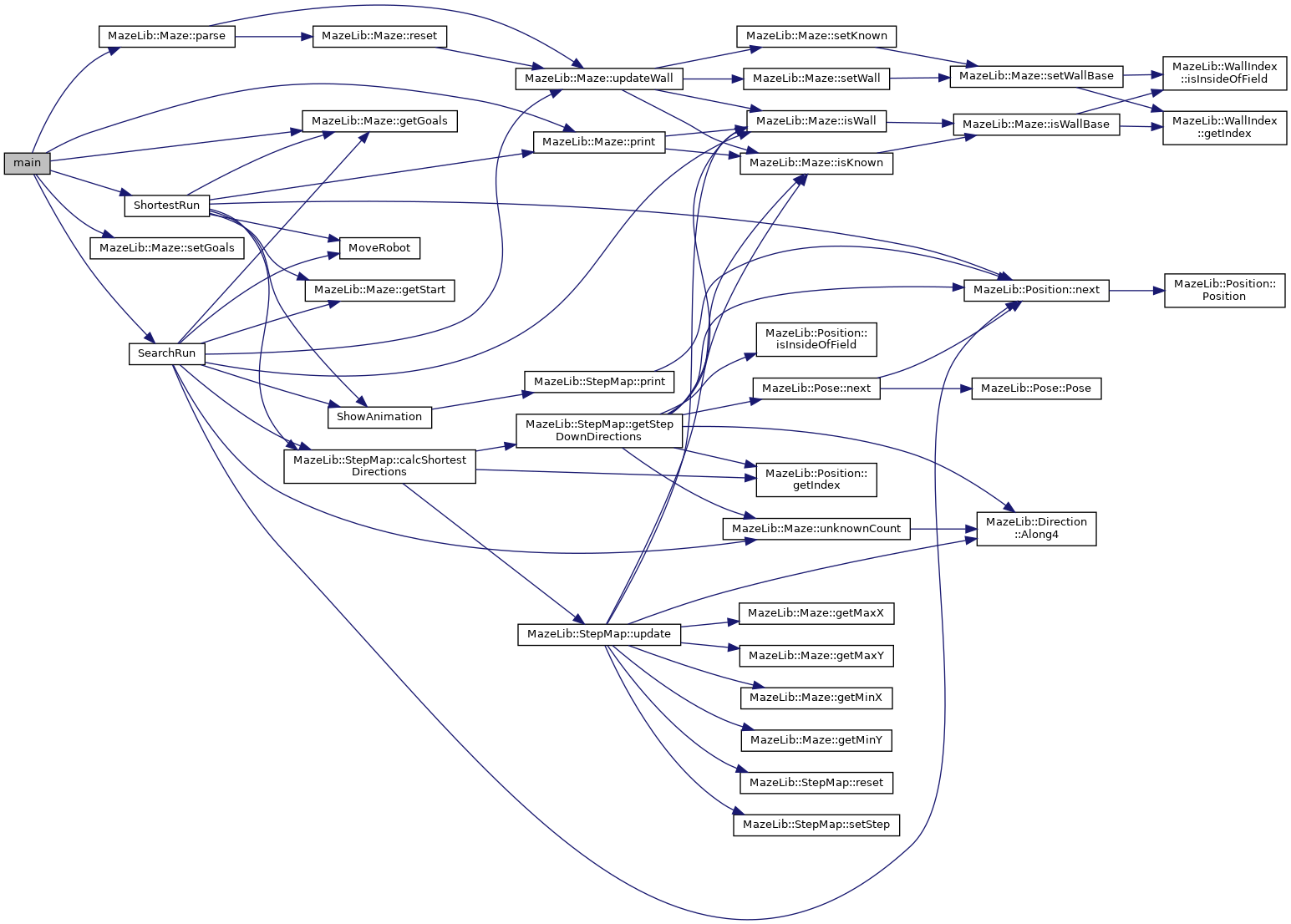
呼び出し関係図:
◆ MoveRobot()
| void MoveRobot | ( | const Direction | relativeDir | ) |
ロボットを動かす模擬関数
- 引数
-
relativeDir 移動方向(自己位置に対する相対方向)
◆ SearchRun()
探索走行のアルゴリズム
bool updateWall(const Position p, const Direction d, const bool b, const bool pushRecords=true)
既知の壁情報と照らしあわせながら、壁を更新する関数
Definition: Maze.cpp:130
int8_t unknownCount(const Position p) const
引数区画に隣接する未知壁の数を返す
Definition: Maze.cpp:125
Directions calcShortestDirections(const Maze &maze, const Position start, const Positions &dest, const bool knownOnly, const bool simple)
与えられた区画間の最短経路を導出する関数
Definition: StepMap.cpp:221
void ShowAnimation(const StepMap &stepMap, const Maze &maze, const Position &pos, const Direction &dir, const std::string &msg)
アニメーション状に迷路を表示する関数
Definition: main.cpp:52
Position next(const Direction d) const
自分の引数方向に隣接した区画の Position を返す
Definition: Maze.cpp:22
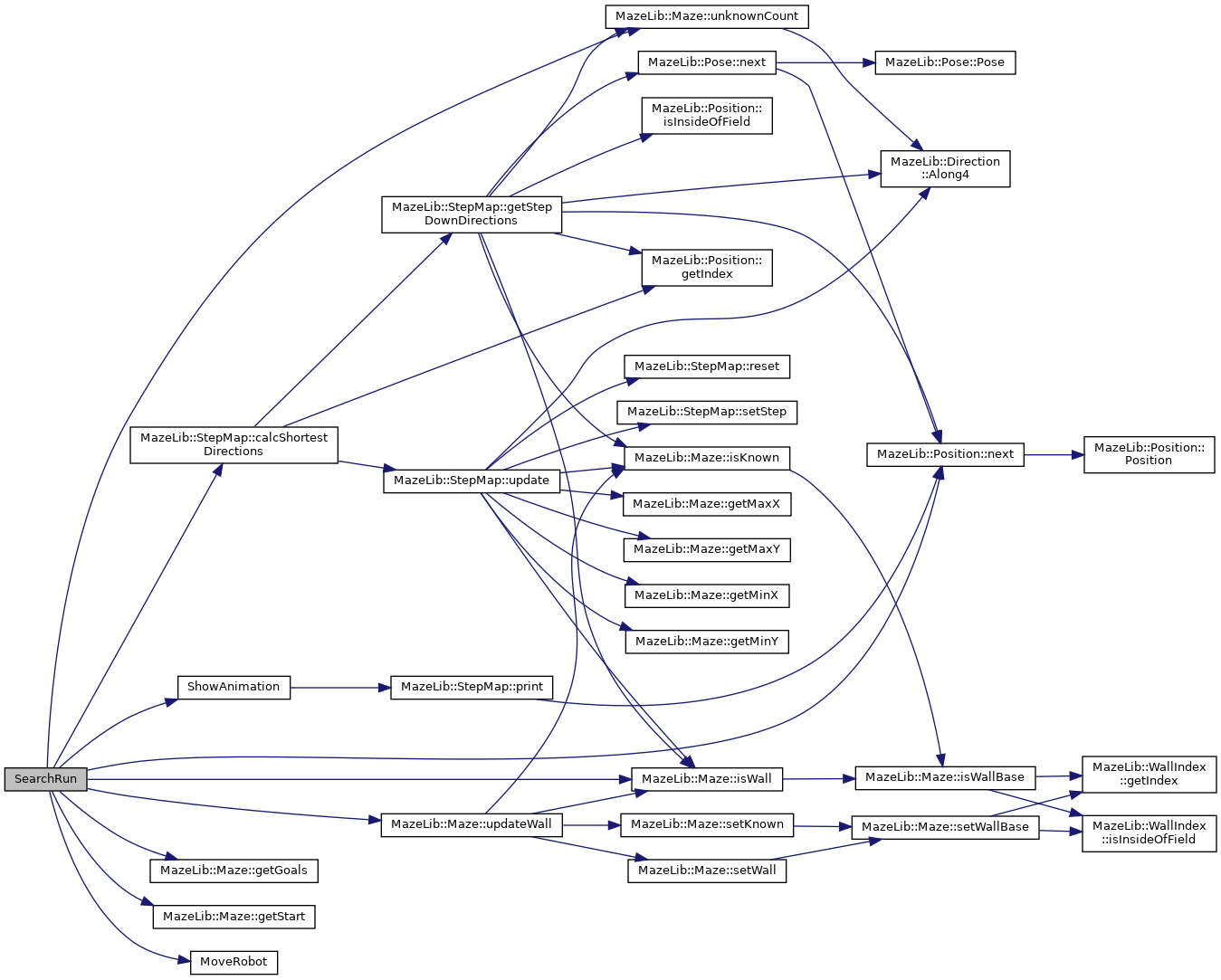
呼び出し関係図:
◆ ShortestRun()
| int ShortestRun | ( | const Maze & | maze | ) |
最短走行のアルゴリズム
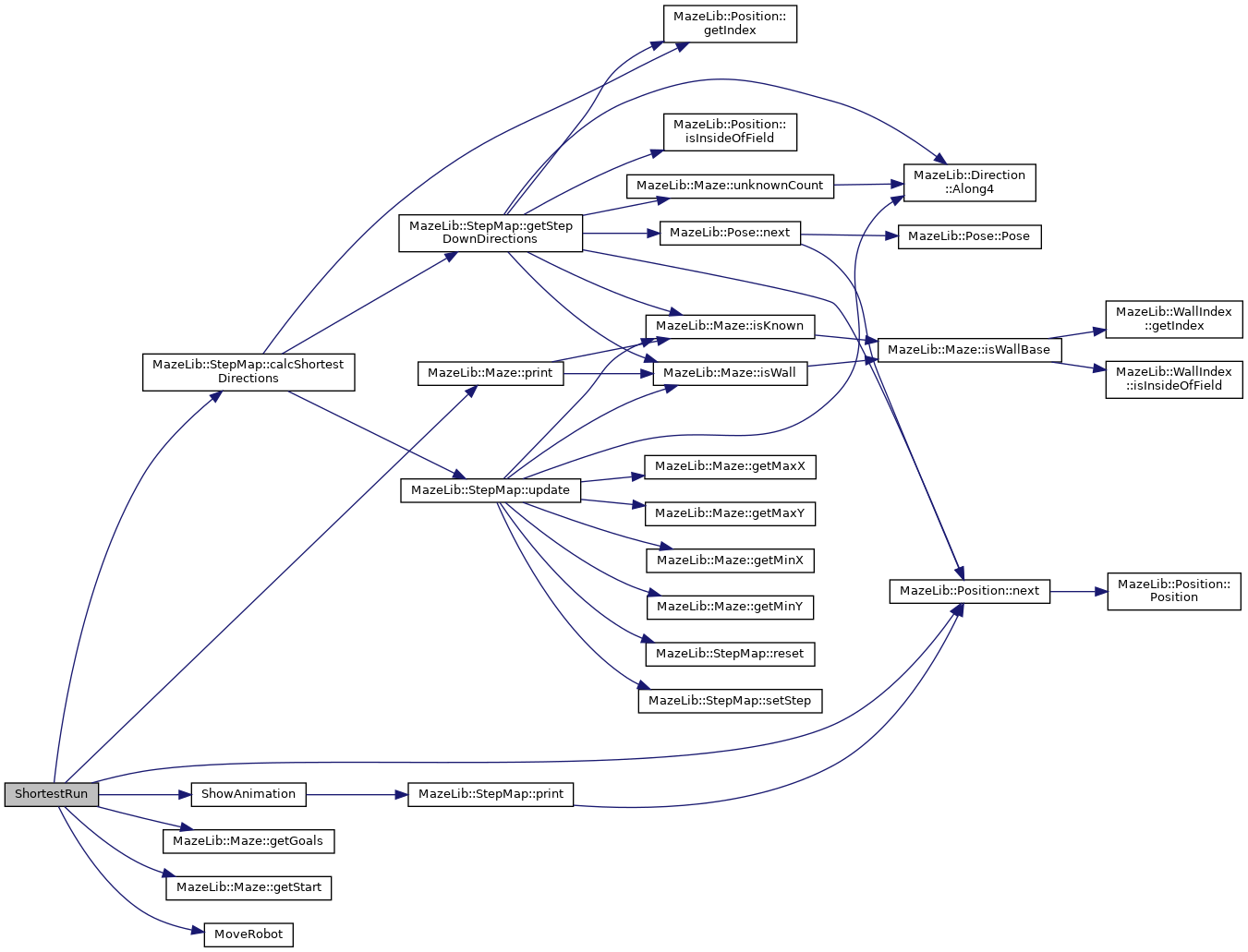
呼び出し関係図:
◆ ShowAnimation()
| void ShowAnimation | ( | const StepMap & | stepMap, |
| const Maze & | maze, | ||
| const Position & | pos, | ||
| const Direction & | dir, | ||
| const std::string & | msg | ||
| ) |
アニメーション状に迷路を表示する関数
- 引数
-
stepMap 表示するステップマップ maze 表示する迷路 pos 迷路上の位置 dir 進行方向
void print(const Maze &maze, const Position p=Position(-1, -1), const Direction d=Direction::Max, std::ostream &os=std::cout) const
ステップの表示
Definition: StepMap.cpp:21
呼び出し関係図:
