迷路の壁情報を管理するクラス [詳解]
#include <Maze.h>
MazeLib::Maze 連携図
公開メンバ関数 | |
| Maze (const Positions &goals=Positions(), const Position start=Position(0, 0)) | |
| デフォルトコンストラクタ [詳解] | |
| void | reset (const bool set_start_wall=true, const bool set_range_full=false) |
| 迷路の初期化。壁を削除し、スタート区画を既知に [詳解] | |
| bool | isWall (const WallIndex i) const |
| 壁の有無を返す [詳解] | |
| bool | isWall (const Position p, const Direction d) const |
| bool | isWall (const int8_t x, const int8_t y, const Direction d) const |
| void | setWall (const WallIndex i, const bool b) |
| 壁を更新をする [詳解] | |
| void | setWall (const Position p, const Direction d, const bool b) |
| void | setWall (const int8_t x, const int8_t y, const Direction d, const bool b) |
| bool | isKnown (const WallIndex i) const |
| 壁が探索済みかを返す [詳解] | |
| bool | isKnown (const Position p, const Direction d) const |
| bool | isKnown (const int8_t x, const int8_t y, const Direction d) const |
| void | setKnown (const WallIndex i, const bool b) |
| 壁の既知を更新する [詳解] | |
| void | setKnown (const Position p, const Direction d, const bool b) |
| void | setKnown (const int8_t x, const int8_t y, const Direction d, const bool b) |
| bool | canGo (const WallIndex i) const |
| 通過可能かどうかを返す [詳解] | |
| bool | canGo (const Position p, const Direction d) const |
| bool | canGo (const WallIndex &i, bool knownOnly) const |
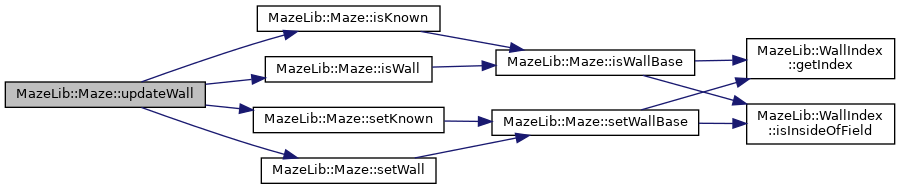
| bool | updateWall (const Position p, const Direction d, const bool b, const bool pushRecords=true) |
| 既知の壁情報と照らしあわせながら、壁を更新する関数 [詳解] | |
| void | resetLastWalls (const int num, const bool set_start_wall=true) |
| 直前に更新した壁を見探索状態にリセットする [詳解] | |
| int8_t | wallCount (const Position p) const |
| 引数区画の壁の数を返す [詳解] | |
| int8_t | unknownCount (const Position p) const |
| 引数区画に隣接する未知壁の数を返す [詳解] | |
| void | print (std::ostream &os=std::cout, const int mazeSize=MAZE_SIZE) const |
| 迷路の表示 [詳解] | |
| void | print (const Directions &dirs, const Position start=Position(0, 0), std::ostream &os=std::cout, const int mazeSize=MAZE_SIZE) const |
| パス付きの迷路の表示 [詳解] | |
| void | print (const Positions &positions, std::ostream &os=std::cout, const int mazeSize=MAZE_SIZE) const |
| 位置のハイライト付きの迷路の表示 [詳解] | |
| bool | parse (std::istream &is) |
| 特定の迷路の文字列(*.maze ファイル)から壁をパースする [詳解] | |
| bool | parse (const std::string &filepath) |
| bool | parse (const std::vector< std::string > &data, const int mazeSize) |
| 配列から迷路を読み込むパーサ [詳解] | |
| void | setGoals (const Positions &goals) |
| ゴール区画の集合を更新 [詳解] | |
| void | setStart (const Position start) |
| スタート区画を更新 [詳解] | |
| const Positions & | getGoals () const |
| ゴール区画の集合を取得 [詳解] | |
| const Position & | getStart () const |
| スタート区画を取得 [詳解] | |
| const WallRecords & | getWallRecords () const |
| 壁ログを取得 [詳解] | |
| int8_t | getMinX () const |
| 既知部分の迷路サイズを返す。計算量を減らすために使用。 [詳解] | |
| int8_t | getMinY () const |
| int8_t | getMaxX () const |
| int8_t | getMaxY () const |
| bool | backupWallRecordsToFile (const std::string &filepath, const bool clear=false) |
| 壁ログをファイルに追記保存する関数 [詳解] | |
| bool | restoreWallRecordsFromFile (const std::string &filepath) |
| 壁ログファイルから壁情報を復元する関数 [詳解] | |
限定公開メンバ関数 | |
| bool | isWallBase (const std::bitset< WallIndex::SIZE > &wall, const WallIndex i) const |
| 壁の確認のベース関数。迷路外を参照すると壁ありと返す。 [詳解] | |
| void | setWallBase (std::bitset< WallIndex::SIZE > &wall, const WallIndex i, const bool b) const |
| 壁の更新のベース関数。迷路外を参照すると無視される。 [詳解] | |
限定公開変数類 | |
| std::bitset< WallIndex::SIZE > | wall |
| 壁情報 [詳解] | |
| std::bitset< WallIndex::SIZE > | known |
| 壁の既知未知情報 [詳解] | |
| Positions | goals |
| ゴール区画の集合 [詳解] | |
| Position | start |
| スタート区画 [詳解] | |
| WallRecords | wallRecords |
| 更新した壁のログ [詳解] | |
| int8_t | min_x |
| 既知壁の最小区画 [詳解] | |
| int8_t | min_y |
| 既知壁の最小区画 [詳解] | |
| int8_t | max_x |
| 既知壁の最大区画 [詳解] | |
| int8_t | max_y |
| 既知壁の最大区画 [詳解] | |
| int | wallRecordsBackupCounter |
| 壁ログバックアップのカウンタ [詳解] | |
フレンド | |
| std::istream & | operator>> (std::istream &is, Maze &maze) |
| 入力ストリームの迷路データをパースする [詳解] | |
詳解
迷路の壁情報を管理するクラス
- 壁情報とスタート位置とゴール位置の集合などを保持する
- 壁の有無の確認は、isWall()
- 壁の既知未知の確認は、isKnown()
- 壁の更新は、updateWall() によって行う
- 壁のバックアップ用に WallRecords 情報も管理する
構築子と解体子
◆ Maze()
|
inline |
デフォルトコンストラクタ
- 引数
-
goals ゴール区画の集合 start スタート区画
void reset(const bool set_start_wall=true, const bool set_range_full=false)
迷路の初期化。壁を削除し、スタート区画を既知に
Definition: Maze.cpp:108
呼び出し関係図:

関数詳解
◆ backupWallRecordsToFile()
| bool MazeLib::Maze::backupWallRecordsToFile | ( | const std::string & | filepath, |
| const bool | clear = false |
||
| ) |
壁ログをファイルに追記保存する関数
int wallRecordsBackupCounter
壁ログバックアップのカウンタ
Definition: Maze.h:866
◆ canGo() [1/3]
呼び出し関係図:

◆ canGo() [2/3]
|
inline |
呼び出し関係図:

◆ canGo() [3/3]
|
inline |

◆ getGoals()
◆ getMaxX()
|
inline |
◆ getMaxY()
|
inline |
◆ getMinX()
|
inline |
既知部分の迷路サイズを返す。計算量を減らすために使用。
◆ getMinY()
|
inline |
◆ getStart()
◆ getWallRecords()
|
inline |
壁ログを取得
◆ isKnown() [1/3]
|
inline |
bool isWallBase(const std::bitset< WallIndex::SIZE > &wall, const WallIndex i) const
壁の確認のベース関数。迷路外を参照すると壁ありと返す。
Definition: Maze.h:871
呼び出し関係図:

◆ isKnown() [2/3]

◆ isKnown() [3/3]
|
inline |

◆ isWall() [1/3]
|
inline |
呼び出し関係図:

◆ isWall() [2/3]

◆ isWall() [3/3]
|
inline |

◆ isWallBase()
|
inlineprotected |
壁の確認のベース関数。迷路外を参照すると壁ありと返す。
呼び出し関係図:
◆ parse() [1/3]
|
inline |
bool parse(std::istream &is)
特定の迷路の文字列(*.maze ファイル)から壁をパースする
Definition: Maze.cpp:165
呼び出し関係図:

◆ parse() [2/3]
| bool MazeLib::Maze::parse | ( | const std::vector< std::string > & | data, |
| const int | mazeSize | ||
| ) |
配列から迷路を読み込むパーサ
- 引数
-
data 各区画16進表記の文字列配列 例:{"abaf", "1234", "abab", "aaff"} mazeSize 迷路の1辺の区画数(正方形のみ対応)
static constexpr const std::array< Direction, 4 > Along4()
斜めではない4方向の配列 (for文などで使用)
Definition: Maze.h:216
bool updateWall(const Position p, const Direction d, const bool b, const bool pushRecords=true)
既知の壁情報と照らしあわせながら、壁を更新する関数
Definition: Maze.cpp:130
呼び出し関係図:

◆ parse() [3/3]
| bool MazeLib::Maze::parse | ( | std::istream & | is | ) |
特定の迷路の文字列(*.maze ファイル)から壁をパースする
テキスト形式。S: スタート区画(単数)、G: ゴール区画(複数可)
+---+---+
| G |
+ + +
| S | G |
+---+---+
- 引数
-
is *.maze 形式のファイルの input-stream
呼び出し関係図:

◆ print() [1/3]
| void MazeLib::Maze::print | ( | const Directions & | dirs, |
| const Position | start = Position(0, 0), |
||
| std::ostream & | os = std::cout, |
||
| const int | mazeSize = MAZE_SIZE |
||
| ) | const |
パス付きの迷路の表示
- 引数
-
start パスのスタート座標 dirs 移動方向の配列 os output-stream mazeSize 迷路の1辺の区画数(正方形のみ対応)
Position next(const Direction d) const
自分の引数方向に隣接した区画の Position を返す
Definition: Maze.cpp:22
呼び出し関係図:

◆ print() [2/3]
| void MazeLib::Maze::print | ( | const Positions & | positions, |
| std::ostream & | os = std::cout, |
||
| const int | mazeSize = MAZE_SIZE |
||
| ) | const |
位置のハイライト付きの迷路の表示
- 引数
-
positions ハイライトする位置の集合 os output-stream mazeSize 迷路の1辺の区画数(正方形のみ対応)
◆ print() [3/3]
| void MazeLib::Maze::print | ( | std::ostream & | os = std::cout, |
| const int | mazeSize = MAZE_SIZE |
||
| ) | const |
迷路の表示
呼び出し関係図:

◆ reset()
| void MazeLib::Maze::reset | ( | const bool | set_start_wall = true, |
| const bool | set_range_full = false |
||
| ) |
迷路の初期化。壁を削除し、スタート区画を既知に
- 引数
-
set_start_wall スタート区画の East と North の壁を設定するかどうか set_range_full 高速化用の min_x などを予め最大に設定するかどうか
呼び出し関係図:

◆ resetLastWalls()
| void MazeLib::Maze::resetLastWalls | ( | const int | num, |
| const bool | set_start_wall = true |
||
| ) |
直前に更新した壁を見探索状態にリセットする
- 引数
-
num 消去する直近の壁の数 set_start_wall スタート区画の East と North の壁を設定するかどうか
呼び出し関係図:

◆ restoreWallRecordsFromFile()
| bool MazeLib::Maze::restoreWallRecordsFromFile | ( | const std::string & | filepath | ) |
壁ログファイルから壁情報を復元する関数
呼び出し関係図:

◆ setGoals()
|
inline |
◆ setKnown() [1/3]
|
inline |
void setWallBase(std::bitset< WallIndex::SIZE > &wall, const WallIndex i, const bool b) const
壁の更新のベース関数。迷路外を参照すると無視される。
Definition: Maze.h:878
呼び出し関係図:

◆ setKnown() [2/3]

◆ setKnown() [3/3]
|
inline |
壁の既知を更新する
- 引数
-
i 壁の位置 b 壁の未知既知 true:既知、false:未知
呼び出し関係図:

◆ setStart()
◆ setWall() [1/3]
|
inline |

◆ setWall() [2/3]

◆ setWall() [3/3]
|
inline |

◆ setWallBase()
|
inlineprotected |
◆ unknownCount()
| int8_t MazeLib::Maze::unknownCount | ( | const Position | p | ) | const |
引数区画に隣接する未知壁の数を返す
- 引数
-
p 区画の座標
- 戻り値
- 既知壁の数 0~4
呼び出し関係図:

◆ updateWall()
| bool MazeLib::Maze::updateWall | ( | const Position | p, |
| const Direction | d, | ||
| const bool | b, | ||
| const bool | pushRecords = true |
||
| ) |
既知の壁情報と照らしあわせながら、壁を更新する関数
既知の壁と非一致した場合、未知壁にして return する
- 引数
-
p 区画の座標 d 壁の方向 b 壁の有無 pushRecords 壁更新の記録に追加する
- 戻り値
- true: 正常に更新された
- false: 既知の情報と不一致だった
void setKnown(const WallIndex i, const bool b)
壁の既知を更新する
Definition: Maze.h:707
呼び出し関係図:
◆ wallCount()
| int8_t MazeLib::Maze::wallCount | ( | const Position | p | ) | const |
引数区画の壁の数を返す
- 引数
-
p 区画の座標
- 戻り値
- 壁の数 0~4
呼び出し関係図:

フレンドと関連関数の詳解
◆ operator>>
|
friend |
入力ストリームの迷路データをパースする
使用例: Maze maze; maze << std::cin;
- 引数
-
is テキスト形式の迷路データを含む入力ストリーム maze パース結果を書き出す迷路の参照
- 戻り値
- std::istream& 引数の is をそのまま返す
メンバ詳解
◆ goals
|
protected |
ゴール区画の集合
◆ known
|
protected |
壁の既知未知情報
◆ max_x
|
protected |
既知壁の最大区画
◆ max_y
|
protected |
既知壁の最大区画
◆ min_x
|
protected |
既知壁の最小区画
◆ min_y
|
protected |
既知壁の最小区画
◆ start
|
protected |
スタート区画
◆ wall
|
protected |
壁情報
◆ wallRecords
|
protected |
更新した壁のログ
◆ wallRecordsBackupCounter
|
protected |
壁ログバックアップのカウンタ
このクラス詳解は次のファイルから抽出されました: