区画ベースのステップマップを管理するクラス [詳解]
#include <StepMap.h>
公開型 | |
| using | step_t = uint16_t |
| ステップの型 [詳解] | |
公開メンバ関数 | |
| StepMap () | |
| デフォルトコンストラクタ [詳解] | |
| void | reset (const step_t step=STEP_MAX) |
| ステップマップを初期化する関数 [詳解] | |
| step_t | getStep (const int8_t x, const int8_t y) const |
| ステップの取得 [詳解] | |
| step_t | getStep (const Position p) const |
| ステップの取得 [詳解] | |
| void | setStep (const int8_t x, const int8_t y, const step_t step) |
| ステップの更新 [詳解] | |
| void | setStep (const Position p, const step_t step) |
| ステップの更新 [詳解] | |
| const auto & | getMapArray () const |
| ステップマップの生配列への参照を取得 (読み取り専用) [詳解] | |
| const auto | getScalingFactor () const |
| ステップのスケーリング係数を取得 [詳解] | |
| void | print (const Maze &maze, const Position p=Position(-1, -1), const Direction d=Direction::Max, std::ostream &os=std::cout) const |
| ステップの表示 [詳解] | |
| void | print (const Maze &maze, const Directions &dirs, const Position start=Position(0, 0), std::ostream &os=std::cout) const |
| void | printFull (const Maze &maze, const Position p=Position(-1, -1), const Direction d=Direction::Max, std::ostream &os=std::cout) const |
| void | printFull (const Maze &maze, const Directions &dirs, const Position start=Position(0, 0), std::ostream &os=std::cout) const |
| void | update (const Maze &maze, const Positions &dest, const bool knownOnly, const bool simple) |
| ステップマップの更新 [詳解] | |
| Directions | calcShortestDirections (const Maze &maze, const Position start, const Positions &dest, const bool knownOnly, const bool simple) |
| 与えられた区画間の最短経路を導出する関数 [詳解] | |
| Directions | calcShortestDirections (const Maze &maze, const bool knownOnly, const bool simple) |
| スタートからゴールまでの最短経路を導出する関数 [詳解] | |
| Pose | calcNextDirections (const Maze &maze, const Pose &start, Directions &nextDirectionsKnown, Directions &nextDirectionCandidates) const |
| ステップマップから次に行くべき方向を計算する関数 [詳解] | |
| Directions | getStepDownDirections (const Maze &maze, const Pose &start, Pose &end, const bool knownOnly, const bool simple, const bool breakUnknown) const |
| ステップマップにより次に行くべき方向列を生成する [詳解] | |
| Directions | getNextDirectionCandidates (const Maze &maze, const Pose &focus) const |
| 引数区画の周囲の未知壁の確認優先順位を生成する関数 [詳解] | |
静的公開メンバ関数 | |
| static void | appendStraightDirections (const Maze &maze, Directions &shortestDirections, const bool knownOnly, const bool diagEnabled) |
| ゴール区画内を行けるところまで直進させる方向列を追加する関数 [詳解] | |
静的公開変数類 | |
| static constexpr step_t | STEP_MAX |
| 最大ステップ値 [詳解] | |
限定公開メンバ関数 | |
| void | calcStraightCostTable () |
| 計算の高速化のために予め直進のコストテーブルを計算する関数 [詳解] | |
限定公開変数類 | |
| std::array< step_t, Position::SIZE > | stepMap |
| 迷路中のステップ数 [詳解] | |
| std::array< step_t, MAZE_SIZE > | stepTable |
| 台形加速を考慮した移動コストテーブル (壁沿い方向) [詳解] | |
静的限定公開変数類 | |
| static constexpr int | stepTableSize = MAZE_SIZE |
| コストテーブルのサイズ [詳解] | |
| static constexpr float | scalingFactor = 2 |
| コストが最大値を超えないようにスケーリングする係数 [詳解] | |
詳解
区画ベースのステップマップを管理するクラス
型定義メンバ詳解
◆ step_t
| using MazeLib::StepMap::step_t = uint16_t |
ステップの型
構築子と解体子
◆ StepMap()
| MazeLib::StepMap::StepMap | ( | ) |
デフォルトコンストラクタ
台形加速のコストテーブルを計算する処理を含む
void calcStraightCostTable()
計算の高速化のために予め直進のコストテーブルを計算する関数
Definition: StepMap.cpp:417
void reset(const step_t step=STEP_MAX)
ステップマップを初期化する関数
Definition: StepMap.h:35
呼び出し関係図:

関数詳解
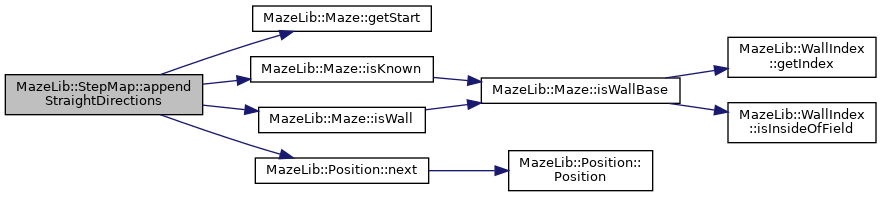
◆ appendStraightDirections()
|
static |
ゴール区画内を行けるところまで直進させる方向列を追加する関数
- 引数
-
[in] maze 使用する迷路 [in,out] shortestDirections 追記元の方向列。これ自体に追記される。 [in] knownOnly 未知壁は壁ありとみなし、既知壁のみを使用する [in] diagEnabled 斜めありなし
呼び出し関係図:
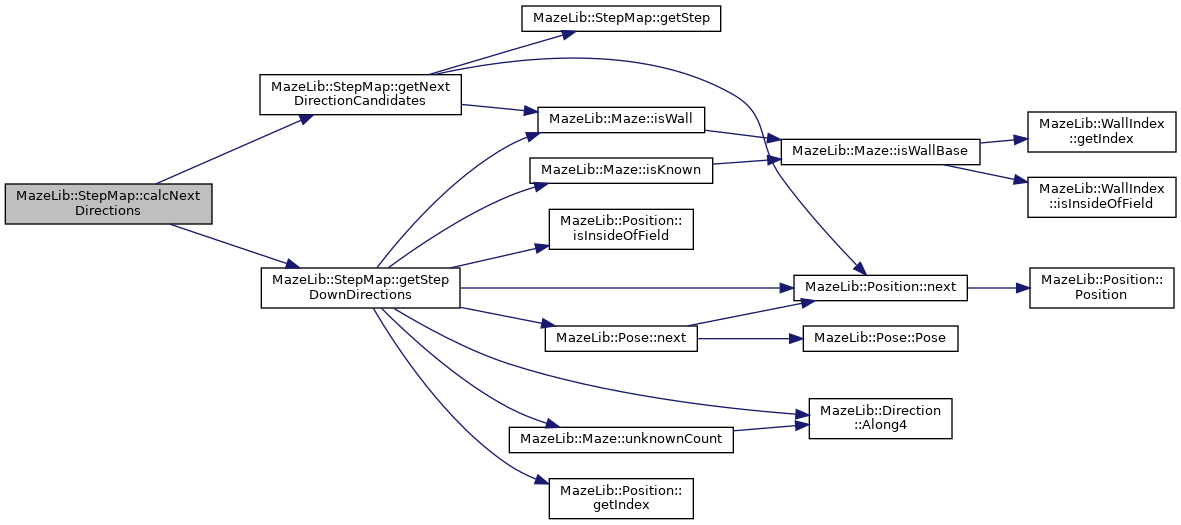
◆ calcNextDirections()
| Pose MazeLib::StepMap::calcNextDirections | ( | const Maze & | maze, |
| const Pose & | start, | ||
| Directions & | nextDirectionsKnown, | ||
| Directions & | nextDirectionCandidates | ||
| ) | const |
ステップマップから次に行くべき方向を計算する関数
- 引数
-
[in] maze 使用する迷路 [in] start 移動開始位置 [out] nextDirectionsKnown 既知区間移動方向列 [out] nextDirectionCandidates 既知区間移動後の移動方向の優先順位
- 戻り値
- 既知区間の最終区画
Directions getNextDirectionCandidates(const Maze &maze, const Pose &focus) const
引数区画の周囲の未知壁の確認優先順位を生成する関数
Definition: StepMap.cpp:330
Directions getStepDownDirections(const Maze &maze, const Pose &start, Pose &end, const bool knownOnly, const bool simple, const bool breakUnknown) const
ステップマップにより次に行くべき方向列を生成する
Definition: StepMap.cpp:243
呼び出し関係図:
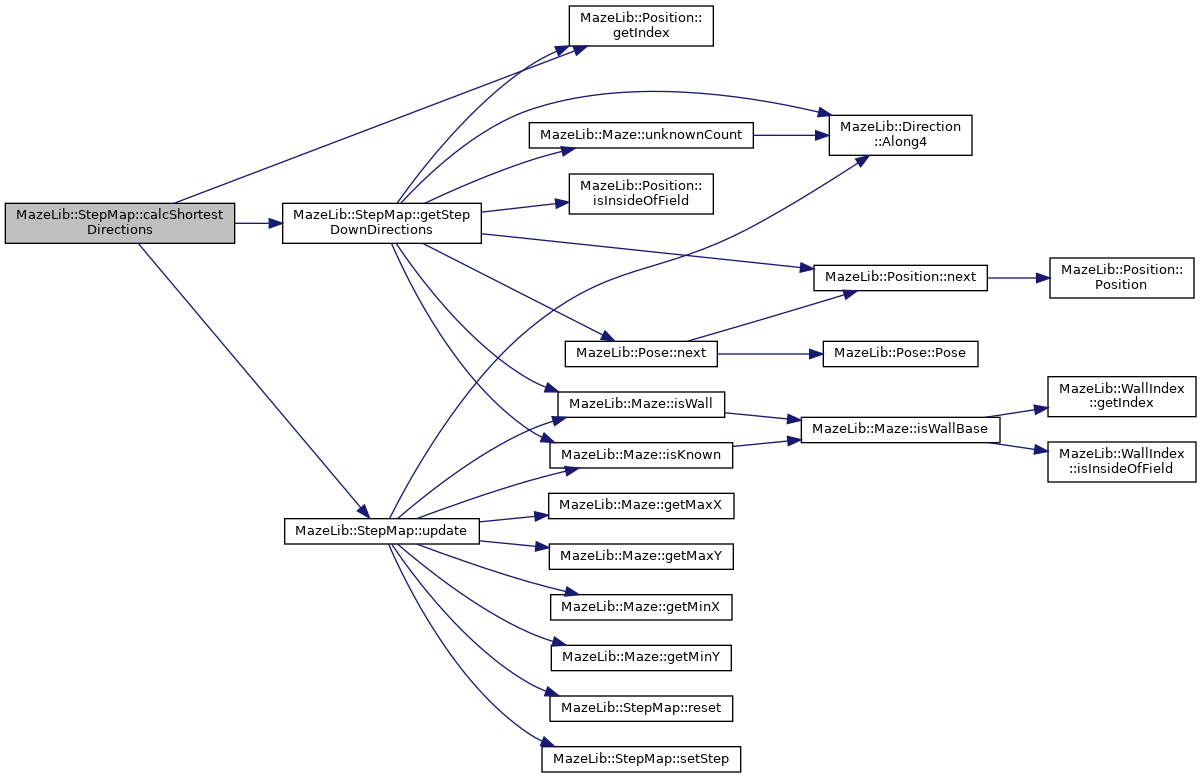
◆ calcShortestDirections() [1/2]
|
inline |
スタートからゴールまでの最短経路を導出する関数
- 引数
-
[in] maze 使用する迷路 [in] knownOnly 未知壁は壁ありとみなし、既知壁のみを使用する [in] simple 台形加速を考慮せず、隣接区画のコストをすべて1にする
- 戻り値
- スタートからゴールへの最短経路の方向列。 経路がない場合は空配列となる。
Directions calcShortestDirections(const Maze &maze, const Position start, const Positions &dest, const bool knownOnly, const bool simple)
与えられた区画間の最短経路を導出する関数
Definition: StepMap.cpp:221
呼び出し関係図:
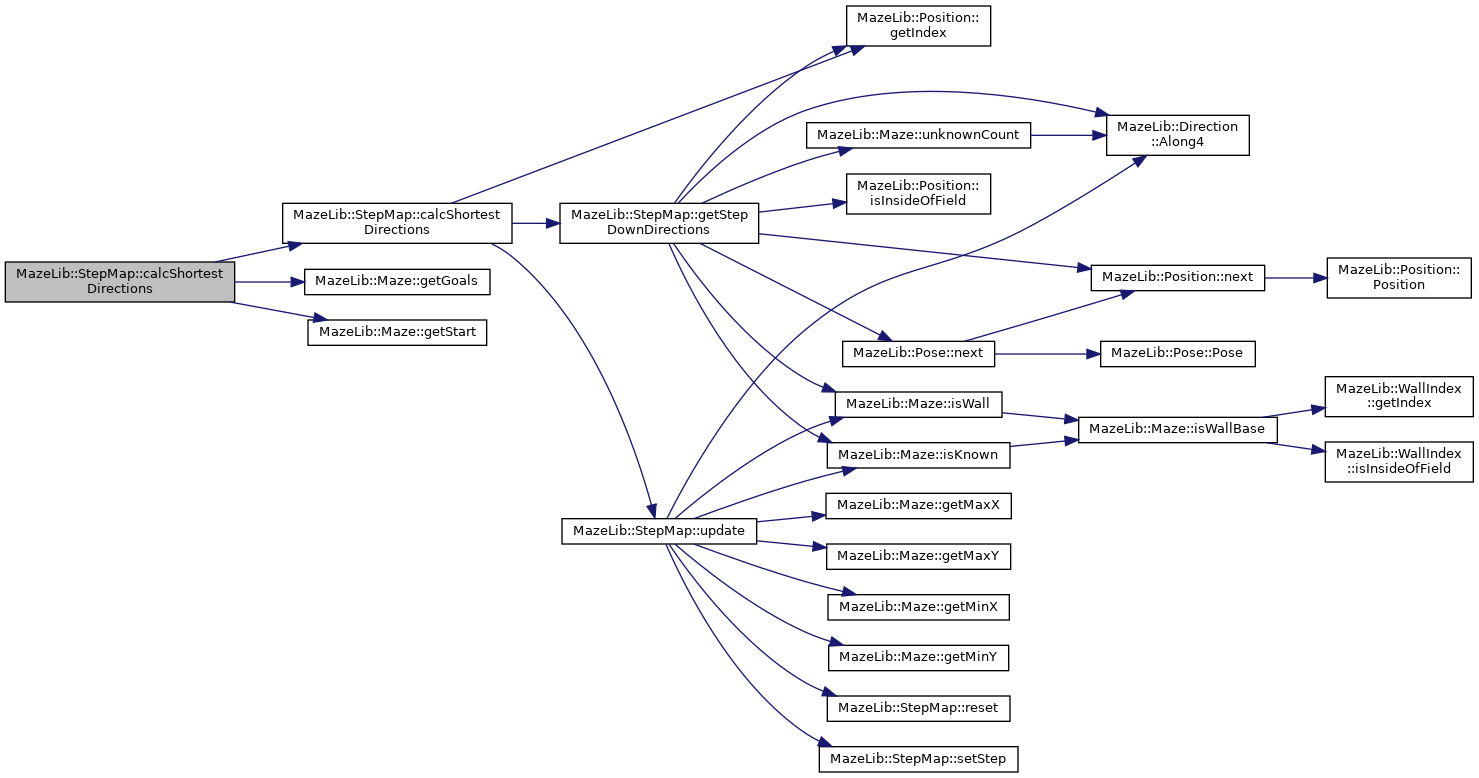
◆ calcShortestDirections() [2/2]
| Directions MazeLib::StepMap::calcShortestDirections | ( | const Maze & | maze, |
| const Position | start, | ||
| const Positions & | dest, | ||
| const bool | knownOnly, | ||
| const bool | simple | ||
| ) |
与えられた区画間の最短経路を導出する関数
- 引数
-
[in] maze 使用する迷路 [in] start 始点区画 [in] dest 目的地区画の集合(順不同) [in] knownOnly 未知壁は壁ありとみなし、既知壁のみを使用する [in] simple 台形加速を考慮せず、隣接区画のコストをすべて1にする
- 戻り値
- 始点区画から目的地区画への最短経路の方向列。 経路がない場合は空配列となる。
std::array< step_t, Position::SIZE > stepMap
迷路中のステップ数
Definition: StepMap.h:177
void update(const Maze &maze, const Positions &dest, const bool knownOnly, const bool simple)
ステップマップの更新
Definition: StepMap.cpp:136
呼び出し関係図:
◆ calcStraightCostTable()
|
protected |
計算の高速化のために予め直進のコストテーブルを計算する関数
std::array< step_t, MAZE_SIZE > stepTable
台形加速を考慮した移動コストテーブル (壁沿い方向)
Definition: StepMap.h:183
static constexpr float scalingFactor
コストが最大値を超えないようにスケーリングする係数
Definition: StepMap.h:181
static constexpr int stepTableSize
コストテーブルのサイズ
Definition: StepMap.h:179
static StepMap::step_t calcStraightCost(const int i, const float am, const float vs, const float vm, const float seg)
台形加速を考慮したコストを生成する関数
Definition: StepMap.cpp:406
呼び出し関係図:

◆ getMapArray()
|
inline |
ステップマップの生配列への参照を取得 (読み取り専用)
◆ getNextDirectionCandidates()
| Directions MazeLib::StepMap::getNextDirectionCandidates | ( | const Maze & | maze, |
| const Pose & | focus | ||
| ) | const |
引数区画の周囲の未知壁の確認優先順位を生成する関数
- 引数
-
[in] maze 使用する迷路 [in] focus 注目する区画の位置姿勢
- 戻り値
- 行くべき方向の優先順位
step_t getStep(const int8_t x, const int8_t y) const
ステップの取得
Definition: StepMap.h:40
呼び出し関係図:

◆ getScalingFactor()
|
inline |
◆ getStep() [1/2]
|
inline |
◆ getStep() [2/2]
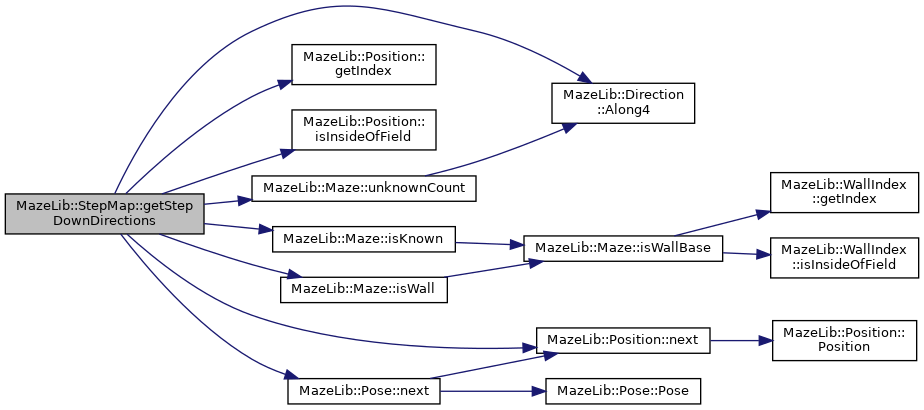
◆ getStepDownDirections()
| Directions MazeLib::StepMap::getStepDownDirections | ( | const Maze & | maze, |
| const Pose & | start, | ||
| Pose & | end, | ||
| const bool | knownOnly, | ||
| const bool | simple, | ||
| const bool | breakUnknown | ||
| ) | const |
ステップマップにより次に行くべき方向列を生成する
- 引数
-
[in] maze 使用する迷路 [in] start 移動開始位置 [out] end 移動後の位置姿勢 [in] knownOnly 未知壁は壁ありとみなし、既知壁のみを使用する [in] simple 台形加速を考慮せず、隣接区画のコストをすべて1にする [in] breakUnknown 未知壁を含む区画に到達したら終了する(探索用)
static constexpr const std::array< Direction, 4 > Along4()
斜めではない4方向の配列 (for文などで使用)
Definition: Maze.h:216
呼び出し関係図:
◆ print() [1/2]
| void MazeLib::StepMap::print | ( | const Maze & | maze, |
| const Directions & | dirs, | ||
| const Position | start = Position(0, 0), |
||
| std::ostream & | os = std::cout |
||
| ) | const |
呼び出し関係図:
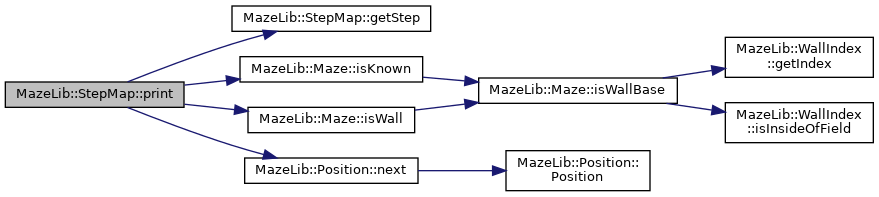
◆ print() [2/2]
| void MazeLib::StepMap::print | ( | const Maze & | maze, |
| const Position | p = Position(-1, -1), |
||
| const Direction | d = Direction::Max, |
||
| std::ostream & | os = std::cout |
||
| ) | const |
ステップの表示
- 引数
-
[in] maze 表示する迷路 [in] p ハイライト区画 [in] d ハイライト方向 [in,out] os output-stream
void print(const Maze &maze, const Position p=Position(-1, -1), const Direction d=Direction::Max, std::ostream &os=std::cout) const
ステップの表示
Definition: StepMap.cpp:21
呼び出し関係図:

◆ printFull() [1/2]
| void MazeLib::StepMap::printFull | ( | const Maze & | maze, |
| const Directions & | dirs, | ||
| const Position | start = Position(0, 0), |
||
| std::ostream & | os = std::cout |
||
| ) | const |
呼び出し関係図:
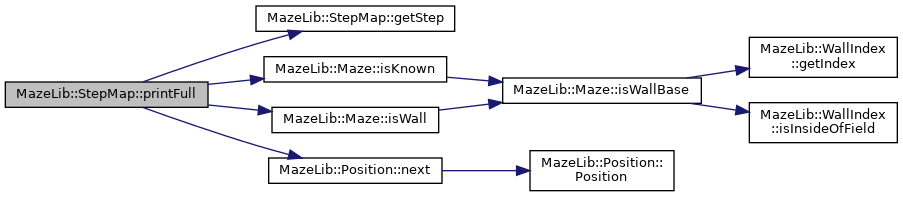
◆ printFull() [2/2]
| void MazeLib::StepMap::printFull | ( | const Maze & | maze, |
| const Position | p = Position(-1, -1), |
||
| const Direction | d = Direction::Max, |
||
| std::ostream & | os = std::cout |
||
| ) | const |
void printFull(const Maze &maze, const Position p=Position(-1, -1), const Direction d=Direction::Max, std::ostream &os=std::cout) const
Definition: StepMap.cpp:82
呼び出し関係図:

◆ reset()
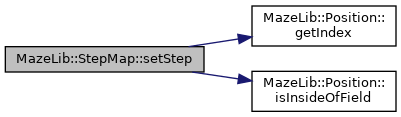
◆ setStep() [1/2]
|
inline |
ステップの更新
盤面外なら何もしない
void setStep(const int8_t x, const int8_t y, const step_t step)
ステップの更新
Definition: StepMap.h:54
◆ setStep() [2/2]
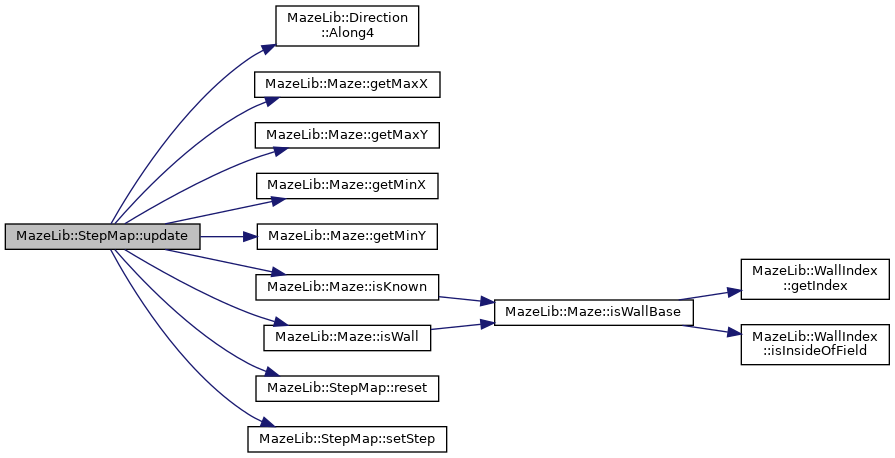
◆ update()
| void MazeLib::StepMap::update | ( | const Maze & | maze, |
| const Positions & | dest, | ||
| const bool | knownOnly, | ||
| const bool | simple | ||
| ) |
ステップマップの更新
- 引数
-
[in] maze 更新に使用する迷路情報 [in] dest ステップを0とする目的地の区画の集合(順不同) [in] knownOnly true:未知壁は通過不可能、false:未知壁は通過可能とする [in] simple 台形加速を考慮せず、隣接区画のコストをすべて1にする
呼び出し関係図:
メンバ詳解
◆ scalingFactor
|
staticconstexprprotected |
コストが最大値を超えないようにスケーリングする係数
◆ STEP_MAX
|
staticconstexpr |
初期値:
=
std::numeric_limits<step_t>::max()
最大ステップ値
◆ stepMap
|
protected |
迷路中のステップ数
◆ stepTable
◆ stepTableSize
|
staticconstexprprotected |
コストテーブルのサイズ
このクラス詳解は次のファイルから抽出されました:
- include/MazeLib/StepMap.h
- src/StepMap.cpp