拘束条件からスラロームを軌道生成するライブラリ [詳解]
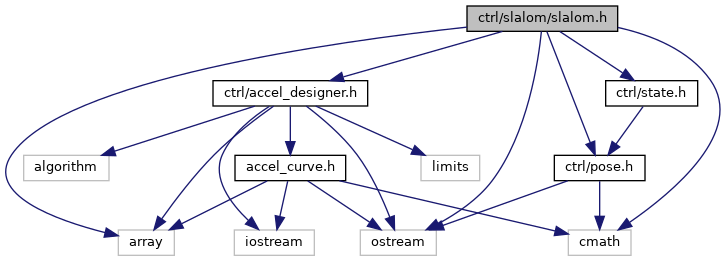
#include <ctrl/accel_designer.h>#include <ctrl/pose.h>#include <ctrl/state.h>#include <array>#include <cmath>#include <ostream>
slalom.h の依存先関係図:
被依存関係図:
クラス | |
| struct | ctrl::slalom::Shape |
| slalom::Shape スラロームの形状を表す構造体 [詳解] | |
名前空間 | |
| ctrl | |
| 制御関係の名前空間 | |
| ctrl::slalom | |
| スラローム関係の名前空間 | |
変数 | |
| static constexpr float | ctrl::slalom::dddth_max_default = 1200 * M_PI |
| 最大角躍度のデフォルト値 [rad/s/s/s] [詳解] | |
| static constexpr float | ctrl::slalom::ddth_max_default = 36 * M_PI |
| 最大角加速度のデフォルト値 [rad/s/s] [詳解] | |
| static constexpr float | ctrl::slalom::dth_max_default = 3 * M_PI |
| 最大角速度のデフォルト値 [rad/s] [詳解] | |