なめらかな加速の設計④ C++による実装例
概要
前回の記事 の続きです。
今回の記事では、今までに示した設計法のC++による実装例を紹介します。
なめらかな加速の設計 目次
ソースコード
以下のソースコードは、まとめてここ からダウンロードできます。
このライブラリには実体はなく、クラスの宣言が書かれたヘッダファイルのみです。
- ライブラリ
accel_curve.h,accel_designer.h - 使用例
simple.cpp,continuous.cpp - 出力された CSV をプロットする MATLAB コード
plotout.m
※使用する際は、これらのファイルはすべて同じディレクトリにおいてください。
設計1 曲線加速
まず、移動距離の拘束がない速度設計クラス AccelCurve を紹介します。
以下のコードは、 accel_curve.h の抜粋です。
/**
* @brief 加速曲線を生成するクラス
*
* - 引数の拘束に従って加速曲線を生成する
* - 始点速度と終点速度をなめらかにつなぐ
* - 移動距離の拘束はない
* - 始点速度および終点速度は、正でも負でも可
*/
class AccelCurve {
public:
/**
* @brief 初期化付きのコンストラクタ。
*
* @param j_max 最大躍度の大きさ [m/s/s/s], 正であること
* @param a_max 最大加速度の大きさ [m/s/s], 正であること
* @param v_start 始点速度 [m/s]
* @param v_end 終点速度 [m/s]
*/
AccelCurve(const float j_max, const float a_max, const float v_start,
const float v_end);
/**
* @brief 時刻 $t$ における躍度 $j$
* @param t 時刻 [s]
* @return j 躍度 [m/s/s/s]
*/
float j(const float t) const;
/**
* @brief 時刻 $t$ における加速度 $a$
* @param t 時刻 [s]
* @return a 加速度 [m/s/s]
*/
float a(const float t) const;
/**
* @brief 時刻 $t$ における速度 $v$
* @param t 時刻 [s]
* @return v 速度 [m/s]
*/
float v(const float t) const;
/**
* @brief 時刻 $t$ における位置 $x$
* @param t 時刻 [s]
* @return x 位置 [m]
*/
float x(const float t) const;
/**
* @brief 終点時刻 [s]
*/
float t_end() const;
/**
* @brief 終点速度 [m/s]
*/
float v_end() const;
/**
* @brief 終点位置 [m]
*/
float x_end() const;
public:
/**
* @brief 走行距離から達しうる終点速度を算出する関数
*
* @param j_max 最大躍度の大きさ [m/s/s/s], 正であること
* @param a_max 最大加速度の大きさ [m/s/s], 正であること
* @param vs 始点速度 [m/s]
* @param vt 目標速度 [m/s]
* @param d 走行距離 [m]
* @return ve 終点速度 [m/s]
*/
static float calcVelocityEnd(const float j_max, const float a_max,
const float vs, const float vt, const float d);
/**
* @brief 走行距離から達しうる最大速度を算出する関数
*
* @param j_max 最大躍度の大きさ [m/s/s/s], 正であること
* @param a_max 最大加速度の大きさ [m/s/s], 正であること
* @param vs 始点速度 [m/s]
* @param ve 終点速度 [m/s]
* @param d 走行距離 [m]
* @return vm 最大速度 [m/s]
*/
static float calcVelocityMax(const float j_max, const float a_max,
const float vs, const float ve, const float d);
/**
* @brief 速度差から変位を算出する関数
*
* @param j_max 最大躍度の大きさ [m/s/s/s], 正であること
* @param a_max 最大加速度の大きさ [m/s/s], 正であること
* @param v_start 始点速度 [m/s]
* @param v_end 終点速度 [m/s]
* @return d 変位 [m]
*/
static float calcMinDistance(const float j_max, const float a_max,
const float v_start, const float v_end);
protected:
float jm; /**< @brief 躍度定数 [m/s/s/s] */
float am; /**< @brief 加速度定数 [m/s/s] */
float t0, t1, t2, t3; /**< @brief 時刻定数 [s] */
float v0, v1, v2, v3; /**< @brief 速度定数 [m/s] */
float x0, x1, x2, x3; /**< @brief 位置定数 [m] */
};
設計2 曲線加減速
次は、移動距離などの拘束条件を満たす加減速設計クラス AccelDesigner を紹介します。
以下のコードは、 accel_designer.h の抜粋です。
/**
* @brief 拘束条件を満たす曲線加減速の軌道を生成するクラス
*
* - 移動距離の拘束条件を満たす曲線加速軌道を生成する
* - 各時刻 $t$ における躍度 $j(t)$、加速度 $a(t)$、速度 $v(t)$、位置 $x(t)$
* を提供する
* - 最大加速度 $a_{\max}$ と始点速度 $v_s$
* など拘束次第では目標速度に達することができない場合があるので注意する
*/
class AccelDesigner {
public:
/**
* @brief 初期化付きコンストラクタ
*
* @param j_max 最大躍度の大きさ [m/s/s/s]、正であること
* @param a_max 最大加速度の大きさ [m/s/s], 正であること
* @param v_sat 飽和速度の大きさ [m/s]、正であること
* @param v_start 始点速度 [m/s]
* @param v_target 目標速度 [m/s]
* @param v_end 終点速度 [m/s]
* @param dist 移動距離 [m]
* @param x_start 始点位置 [m] (オプション)
* @param t_start 始点時刻 [s] (オプション)
*/
AccelDesigner(const float j_max, const float a_max, const float v_sat,
const float v_start, const float v_target, const float dist,
const float x_start = 0, const float t_start = 0);
/**
* @brief 時刻 $t$ における躍度 $j$
* @param t 時刻[s]
* @return j 躍度[m/s/s/s]
*/
float j(const float t) const;
/**
* @brief 時刻 $t$ における加速度 $a$
* @param t 時刻 [s]
* @return a 加速度 [m/s/s]
*/
float a(const float t) const;
/**
* @brief 時刻 $t$ における速度 $v$
* @param t 時刻 [s]
* @return v 速度 [m/s]
*/
float v(const float t) const;
/**
* @brief 時刻 $t$ における位置 $x$
* @param t 時刻 [s]
* @return x 位置 [m]
*/
float x(const float t) const;
/**
* @brief 終点時刻 [s]
*/
float t_end() const;
/**
* @brief 終点速度 [m/s]
*/
float v_end() const;
/**
* @brief 終点位置 [m]
*/
float x_end() const;
/**
* @brief std::ostream に軌道のcsvを出力する関数。
*/
void printCsv(std::ostream &os, const float t_interval = 0.001f) const;
/**
* @brief 情報の表示
*/
friend std::ostream &operator<<(std::ostream &os, const AccelDesigner &obj);
protected:
float t0, t1, t2, t3; /**< @brief 境界点の時刻 [s] */
float x0, x3; /**< @brief 境界点の位置 [m] */
AccelCurve ac, dc; /**< @brief 曲線加速、曲線減速オブジェクト */
};
使用例
次に、 AccelDesigner の使用例を紹介します。
シンプル
一番簡単な例として以下の C++コードをご覧ください。 実行すると、標準出力に CSV が表示されます。
# Linux コマンド実行例
g++ sample.cpp
./a.out
#include <cstdio>
#include <fstream>
#include <iostream>
#include "accel_designer.h"
int main(void) {
// パラメータを設定
const float j_max = 120000;
const float a_max = 9000;
const float v_max = 1800;
const float v_start = 0;
const float v_target = 600;
const float distance = 720;
// 曲線を生成
ctrl::AccelDesigner ad(j_max, a_max, v_max, v_start, v_target, distance);
// CSV出力
for (float t = 0; t < ad.t_end(); t += 0.001f) {
printf("%f,%f,%f,%f,%f\n", t, ad.j(t), ad.a(t), ad.v(t), ad.x(t));
}
return 0;
}
連続使用
加減速をいくつか繰り返して、out.csv ファイルに書き込む例です。
前回の終点の速度や位置を、次回の始点速度、位置に使っています。
# Linux コマンド実行例
g++ continuous.cpp
./a.out
# MATLAB でプロット
matlab -nodesktop -r plotout
#include <fstream>
#include <iostream>
#include "accel_designer.h"
int main(void) {
std::ofstream of("out.csv"); //< 出力ファイル名
ctrl::AccelDesigner ad; //< 曲線加速設計器
const float j_max = 120000;
const float a_max = 9000;
const float v_max = 2400;
ad.reset(j_max, a_max, v_max, ad.v_end(), 1200, 1080, ad.x_end(), ad.t_end()); //< 曲線の生成
ad.printCsv(of); //< CSVファイル出力
ad.reset(j_max, a_max, v_max, ad.v_end(), 600, 360, ad.x_end(), ad.t_end()); //< 曲線の生成
ad.printCsv(of); //< CSVファイル出力
ad.reset(j_max, a_max, v_max, ad.v_end(), 0, 720, ad.x_end(), ad.t_end()); //< 曲線の生成
ad.printCsv(of); //< CSVファイル出力
return 0;
}
CSV を MATLAB でプロット
以下の MATLAB コードで、生成された out.csv をプロットできます。
%% cleaning
clear;
set(groot, 'DefaultTextInterpreter', 'Latex');
set(groot, 'DefaultLegendInterpreter', 'Latex');
set(groot, 'DefaultLineLineWidth', 2);
%% load
rawdata = csvread('out.csv');
t = rawdata(:, 1);
j = rawdata(:, 2);
a = rawdata(:, 3);
v = rawdata(:, 4);
x = rawdata(:, 5);
%% plot
titles= {'Jerk', 'Acceleration', 'Velocity', 'Position'};
ylabels= {'$j$ [mm/s/s/s]', '$a$ [mm/s/s]', '$v$ [mm/s]', '$x$ [mm]'};
xlabelstr = '$t$ [s]';
figure(1);
data = [j a v x];
for i = 1 : 4
subplot(4, 1, i);
hold off; plot(nan, nan); % clean
hold on;
ax = gca; ax.ColorOrderIndex = i;
plot(t, data(:, i));
grid on;
xlabel(xlabelstr);
ylabel(ylabels(i));
title(titles(i));
end
上記の連続使用のコード例をプロットしたのが以下の図です。
CSVをMATLABでプロット
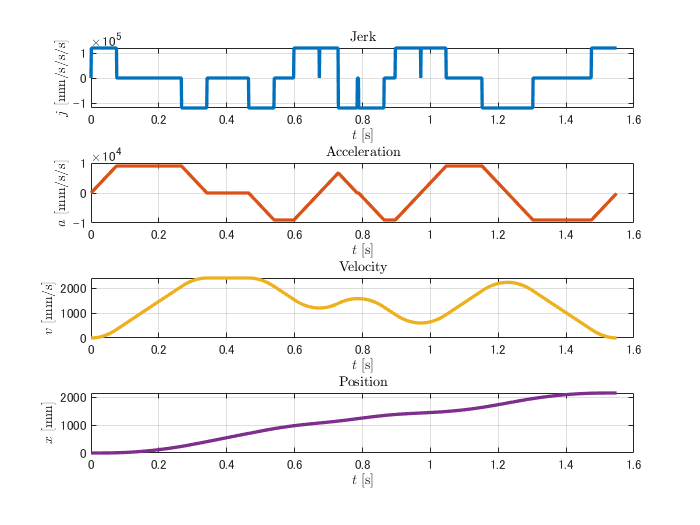
なめらかな曲線加速になっていることがわかります。
実装上の工夫
使いやすさ
今回作ったライブラリでは、コンストラクタや reset() 関数でパラメータを設定してあげれは
あとは $v(t)$ のように時間の関数として使えるようにしました。
複雑な場合分けは内部で行われていて、使い方はとてもシンプルになっています。
移植性の考慮
今回のクラス設計では、
- 走行距離 $d$ を考慮して終点速度 $v_e$ を求める関数
AccelCurve::calcVelocityEnd() - 走行距離 $d$ を考慮して最大速度 $v_m$ を求める関数
AccelCurve::calcVelocityMax()
は、設計1の AccelCurve クラスに実装しました。
というのも、曲線生成部分がすべて AccelCurve クラスにまとまっているので、
今後、曲線部分を2次関数ではない別の関数に変えたくなったら、 AccelCurve クラスの中身を変更するだけで済むようになっています。
まとめ
さて、なめらかな加速について考えてきました。
今回の設計によって、拘束条件を満たす走行軌道を生成することができました。
あとは、機体がこれを追従するコードを書くだけですね!
といっても、それもまた難しいですが…
免責
設計には欠陥やミスがあるかもしれません。くれぐれも自己責任ご使用ください。
もしミスや改良点を見つけたら是非教えてください!@kerikun11