プチコンに参加しました
こんにちは。けりです。
プチコン・Cheese杯 お疲れ様でした!
今回は、Cheese杯の傍ら行われていたトレース競技の参加報告です。
プチコン・トレース部門
競技目的は日々の活動の動機づけ
プチコンは、ロ技研での日々の活動に目的を与えるもので、今年度新たに始まりました。
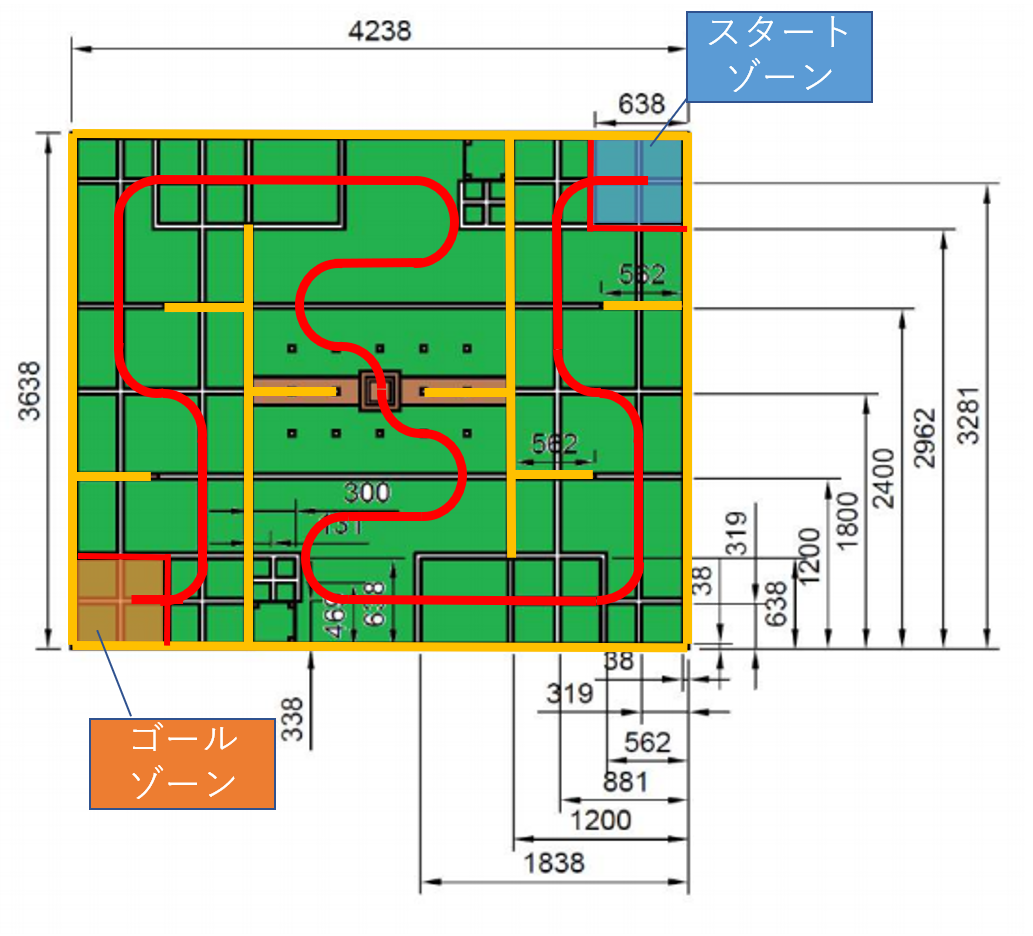
スタート地点からゴール地点までたどり着く時間を競います。
ラインはあるが、トレースしなくてもよい
フィールドにはスタートからゴールまでトレース用のラインが引かれていますが、別にラインをトレースする必要はありませんw
壁はあるが、越えてもよい
とにかく面白いものを作ることが目的で、独自性のあるアイデアに重点が置かれています。
フィールド
出場機体: KERISE v3-2
僕は、マイクロマウス競技に出場したものと同じ機体 KERISE v3-2で出場しました。
KERISE v3-2
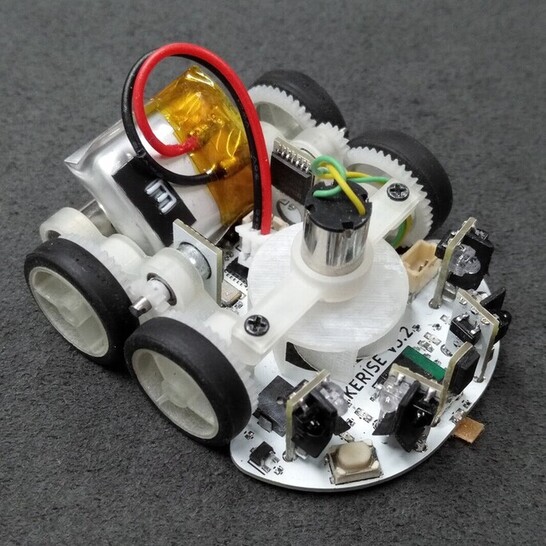
KERISEにはライントレース機構はありませんが、エンコーダとジャイロセンサがあるので、それらのセンサを基にラインをガン無視して、センサを積分して得た位置だけを信じてゴールを目指しました。
探索は不可能だった…
プチコンは面白さがメインなので、当初はゴール座標だけ設定して、フィールド探索をさせようかと思っていたのですが、ゴール座標を計算してみると(39,43)という32x32の迷路の範囲外でした。
64x64の迷路にすればゴール座標に設定することはできますが、計算量が膨大になり、計算が間に合わなくなります。
マスの大きさをクラシックにすれば範囲内に収まったのですが、コード設計を始めたのが前日の夜だったので、間に合いませんでした…
事前に経路を求めて最短走行
ということで、探索はあきらめて、走行経路の情報をマウスにあらかじめ書き込んでおいて、最短経路だけ走らせました。
超絶悪環境のロンリウム
今回のフィールドはNHKロボコンなどさまざなロボコンで使われているロンリウムという素材の床でした。大きなロボットにとっては何も問題はありませんが、ハーフサイズのマイクロマウスであるKERISEにとっては山あり谷ありの超絶悪環境でした。
つなぎ目でジャンプ!
ロンリウムのつなぎ目はめくれ上がっています。
試走のとき、勢いよくつなぎ目に侵入したKERISEは、めくれたつなぎ目がジャンプ台の役割を果たして飛び上がり、コロコロ転がっていきました。普段は見れないKERISEの一面を見た気がします。
つなぎ目は養生テープでつないでもらって何とか走ることができました。
吸引機構でロンリウムを攻略
KERISEは吸引機構を持っているので、普段マイクロマウスでは抑えめの吸引をマックスにすることで、ロンリウム表面のウネウネをなんとか乗り切りましたw
結果
僕はCheese杯の運営の方で忙しくて、他の人の状況はあまり見れなかったのですが、気づいたら 優勝 してましたwww
他の人はプチコンのための機体を一生懸命作っていたところを、もともとある機体を一晩調整しただけの僕が優勝してしまって、大変申し訳ないです…(汗
ただ、圧倒的に小さいロボットが広いコースを悠々と走って、会場を盛り上げることができたので、とてもよかったです。
運営/企画してくれたのもくんや計測をしてくれた方々、本当にありがとうございました!
走行の様子
練習の動画、しかも失敗したときのものしかありませんでした…残念…
ライントレース用のラインに躓いて転んでいます…(笑
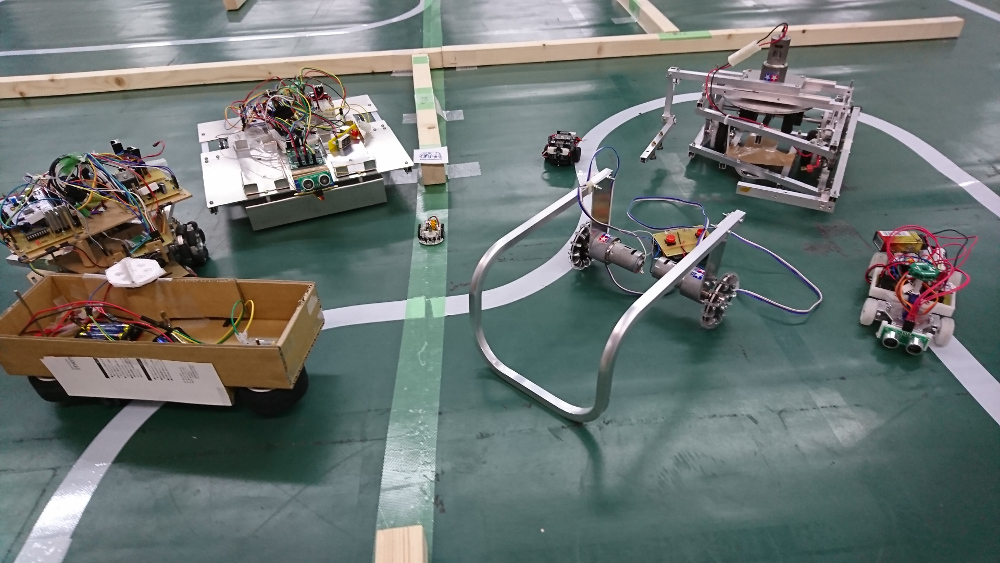
他のロボット
曲げた棒にモーターとタイヤをつけたシンプルなロボットや、1つのモーターに対して歯車などを駆使して壁を伝って走行するロボットなど、さまざまなアイディアが溢れていました。
競技に参加したロボットたち
まとめ
プチコンを企画者してくれたのもくん、ありがとうございます。
参加者の皆さん、お疲れ様でした!
来年の開催も楽しみにしています。